记录关于 Contraction Hierarchies 算法的记录。
今晚(其实已经是到第二天凌晨了=-=)看同学的 多源最短路径 算法导论第25章 里面拓展的 Contraction Hierarchies 始终觉得很奇怪,于是回到宿舍和 Gemini 讨论了一下,在此记录。
双向 Dijkstra
在此之前需要补充双向 Dijkstra(Bidirectional Dijkstra)的相关知识,同时从起点和终点进行搜索,直到两者相遇后(实际上的是保证没有更短的路径时)即停止。
随便找一个图,可以辅助理解下,搜索空间会比单向搜索要小不少。丑完了
但是依旧效率不够高,介于 Dijkstra 每次选择最短边,可以构建以下情况:
graph LR
A -->|9| Z
A -->|2| C
C -->|2| D
D -->|2| E
E -->|2| F
F -->|2| Z
显然最短路径是 ,权重为 9。
按照 Dijkstra 的算法探索 ,会是 ,此时权重为 8。下一步发现 的权重小于 的权重 10,此时才会探索 。
浪费了很多时间探索中间节点,但是却是无效的,这就是 Contraction Hierarchies 的创新点————通过构建捷径,强制查找过程变成倒 V 型的爬坡再下坡。
(这里没有直接显式的分层,比如按照 Geo 坐标指引先上“高速”,而是转化为 Rank 递增递减)
Contraction Hierarchies
显然需要有办法直接走捷径而不是探索太多的中间节点,减少无效搜索。
先说一下 Contraction Hierarchies 的两个部分:
- 预处理
-
- 先对节点以某种方式优先级排序
-
- 依照排序取 ,为符合条件的 添加捷径 (shortcut)
- 查询 的最短路径
-
- 从 和 同时进行双向 Dijkstra 搜索,但是必须是升序
预处理
预处理阶段简单来说就是先决定节点的 Rank,然后按照 Rank 的顺序依次生成捷径,将“山谷”填平,最终使得任意两点之间的最短路径,是由 Rank 先严格升序再严格降序的节点构成的,存在一个 Peak 转折点,即为下文查找过程中,双向 Dijkstra 搜索时的交汇处。
1 | u |
节点排序
节点排序是最重要的部分,目的是最小化最终捷径的数量,使得查询效率更高。(或者说是最小化每对 搜索成本之和?)
按照 Wiki 中的说法,最优排序是 NP-Complete 的,所以实际中会使用启发式算法来近似求解。
构建启发式函数有几个关键指标:捷径的数量、节点的度数、均匀分布等。
太复杂了,要想细讲这个就只能翻论文了,看了一圈没有什么最优定义
此外还需要 Lazy Updating 懒更新,避免在每次添加捷径后都更新启发式函数值,成本太高。
添加捷径(Witness Search)
需要保证有捷径的图和原图等价的。
首先考虑添加捷径的时候,不会影响最短路径的正确性:
对于处理 ,分两种情况:
-
的最短路径不经过 , 那么不会添加捷径(会由更短的路径的中间节点来添加捷径)
-
的最短路径经过 , 那么添加捷径 的权重是 ,保持正确。
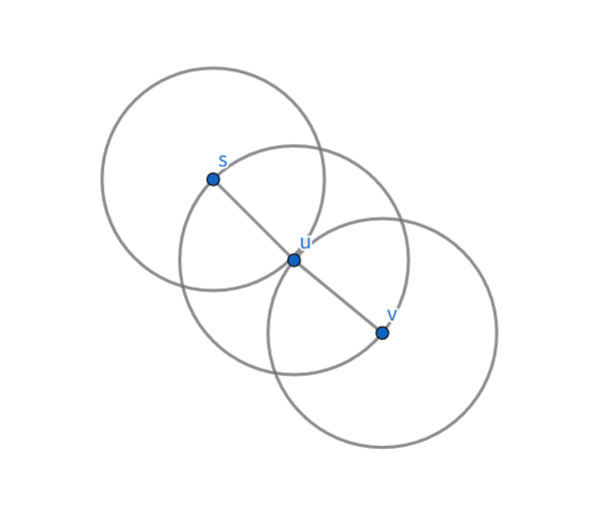
具体来说如何判断:从 开始执行一次局部的 Dijkstra 搜索,目标是 。在搜索时,屏蔽节点 (即不允许走经过 的路径),且搜索的深度或距离上限设定为 。
处理中间节点
有了添加捷径的逻辑之后,更高一层是按照 Rank 的顺序取节点 作为中间节点,取其前驱节点集合为 ,后继节点集合为 。
对于 中的每个节点 和 中的每个节点 ,筛选满足 和 的节点对 ,如果 的最短路径经过 ,则添加捷径 。
构建捷径必须服务于后文的查找逻辑,所以要求 和 ,目的是去掉不严格升序/降序的节点,构建捷径。
当 < rank(v)$ 时, 是严格升序的
当 < rank(s)$ 时, 是严格降序的
但总之目的是“填平”路径。
我想当时现场讨论和 Blog 内容(对每对入邻 u(u→v)和出邻 w(v→w)执行一次“witness search”),就是缺少了这个要求。并不是无条件对每对都处理,这样在后续查询要求递增/递减时会变成断路(我猜想)。
记录绕过的中间节点
走过捷径后,输出结果时,显然需要复原通过的中间节点。
应该为每一条捷径记录被绕过的中间节点 (长捷径是通过短捷径加上绕过的中间节点构成的)。
构建正向图和反向图
正向图必须严格升序,反向图必须严格降序。
查询
查询时很简单,直接从 和 同时进行双向 Dijkstra 搜索,但是双向都必须是升序(即用正向图和反向图),直到两者相遇。
注意这里并不是只搜索捷径组成的图,而是搜索包含原边和捷径的向上图。(比如对于 的情况,其不会构造捷径,但是查询时就应该走 )
在此粘贴一份 Gemini 的总结:
Contraction Hierarchies (CH) 是现代路线规划(特别是静态路网)中最优雅、最高效的算法之一。它的核心魅力在于将寻找最短路径的问题,转化为在预处理好的“分层图(Hierarchical Graph)”中寻找“先升后降(Up-Down)”路径的问题。
为了彻底理清这个算法,我们可以将它拆解为预处理(Preprocessing)和在线查询(Query)两个主要阶段。以下是完整且严谨的执行过程。
一、 预处理阶段:节点排序(Node Ordering)
在进行任何收缩之前,算法首先需要给图中的每一个节点分配一个重要度层级(Rank/Order)。可以将其理解为节点被处理的优先级。
- 评估节点重要性: 系统会通过启发式策略(Heuristics)来评估每个节点。常见的评估指标包括:
- 边差度(Edge Difference): 收缩该节点会新增的 Shortcut 数量减去被移除的关联边数量。值越小,说明收缩它引入的额外边越少,优先级越高(越先被收缩)。
- 均匀分布(Uniformity): 避免将密集区域的节点连续收缩,尽量让收缩过程在整个图中均匀发生。
- 分配 Rank: 最终,所有节点被赋予一个从 到 的全局唯一标识 。 越小,代表越处于“底层”(如乡间小路交汇点); 越大,代表越处于“高层”(如高速公路枢纽)。
二、 预处理阶段:节点收缩与 Shortcut 插入
分配好 Rank 后,算法严格按照 Rank 从低到高的顺序,依次收缩(Contract)每一个节点。
假设我们当前正在收缩节点 :
- 寻找邻居: 找出所有以 为终点的入边 和以 为起点的出边 。
- 关键限制: 我们只关心那些尚未被收缩的邻居节点(即 且 )。
- 见证者搜索(Witness Search): 对于每一对这样的前驱 和后继 ,算法需要判断:如果不经过 ,是否存在一条从 到 的等价或更短路径?
- 从 开始执行一次局部的 Dijkstra 搜索,目标是 。
- 在搜索时,屏蔽节点 (即不允许走经过 的路径),且搜索的深度或距离上限设定为 。
- 判断与插入:
- 不需要 Shortcut: 如果局部搜索找到了一条路径,其长度 ,则说明 是可以被安全忽略的(即 不是唯一的最短路)。我们什么都不用做。
- 插入 Shortcut: 如果找不到更短的替代路径,说明 就是局部最短的。为了保证去掉 后,这一段的距离信息不丢失,我们强制插入一条边(Shortcut) ,其权重为 。同时在这条 Shortcut 上记录“生成者”是 。
- 移除节点 : 在逻辑上将 从图中暂时移除,继续收缩下一个 Rank 更高的节点。
阶段产物: 预处理结束后,我们得到了一张包含了所有原图边 + 所有新生成的 Shortcut 边的扩展图。
三、 构建向上图(Upward Graph)与向下图(Downward Graph)
在查询阶段,我们不需要在复杂的全图中漫无目的地搜索,而是利用节点的 Rank 将图拆分为两个子图:
- 向上图 : 只保留满足 的有向边(包括原边和 Shortcut)。
- 向下图 : 只保留满足 的有向边(包括原边和 Shortcut)。
由于所有边严格按照 Rank 单向流动,这两个子图都是有向无环图(DAG)。
四、 在线查询:双向 Dijkstra(Bidirectional Dijkstra)
查询阶段是整个 CH 算法的精髓。对于给定的起点 和终点 ,算法执行双向搜索,但有着极其严格的方向限制。
- 正向搜索(Forward Search):
- 从起点 出发,维持一个优先队列。
- 核心限制:只能在向上图 中进行。 即当前在节点 ,只能沿着边走到 ,前提是 。
- 记录正向距离
distF。
- 反向搜索(Backward Search):
- 从终点 出发,维持另一个优先队列。
- 核心限制:只沿着原图中的“入边”回溯,且同样只允许 Rank 升高。 换句话说,如果在原图中存在边 ,当前在 的反向搜索只能走到 ,前提是 。
- 记录反向距离
distB。
- 相交与更新最佳距离:
- 维护一个全局变量
bestDist(初始为 )。 - 每当正向搜索和反向搜索都访问到了同一个节点 时,计算
distF[m] + distB[m]。 - 如果
distF[m] + distB[m] < bestDist,则更新bestDist,并记录此时的交汇节点 (即最高点 Peak)。
- 停止条件(Stopping Criterion):
- 当两个优先队列队首元素的最小值(即各自将要探索的最短可能距离)之和 时,搜索停止。此时的
bestDist就是真正的全局最短距离。
五、 路径还原(Path Unpacking)
双向搜索结束后,我们只得到了距离和一条由 Shortcut 及原边组成的混合路径 。这在实际导航中是无法使用的,需要进行解包(Unpacking)。
- 拿到最终构成最短路径的每一条边。
- 检查边是否是 Shortcut:
- 如果是原边,保留。
- 如果是 Shortcut ,读取预处理时记录的中间节点 。
- 递归展开:
- 将 Shortcut 替换为 和 两条边。
- 如果拆分出来的边依然是 Shortcut,继续递归拆分,直到路径上的所有边全部退化为原图中的原始边。
- 最终,输出这串原始的节点序列。
看到除此之外的还有 CCH 算法,可以在预处理和查询阶段之间额外添加一层,额外添加客制化处理,而无需从头构建。但越翻越发现都是搞路网、寻路的论文精读的 Blog 了…果断撤退。
TODO: 代码实现,Gemini 糊了下居然没糊出来…
说些什么吧!